
I have been looking for ways to get a better video streaming performance from my Raspberry Pi 3. What I mean by better performance is streaming with high fps and low video latency. In this article, I explained how to stream video-images with MJPEG compression from a Raspberry Pi to a Laptop over Wifi, using the Picamera library. The images are recorded by a camera module and streamed in real time from the RPi (the client) to a Laptop (the server). I use:
- a Rapberry Pi 3, with Raspbian OS,
- a camera module v.2
-
The RPi is loaded with Python3 and the Picamera library. Picamera* is a library that provides a python interface to the camera. It can be installed with a simple pip command in the Terminal (
pip3 install picamera). - The server is a Macbook Pro, and is connected to the same Wifi as the RPi.
Let’s have a look at the codes we will be using for our little experiments.
1. The codes
The code is a modified version of the code provided on the Picamera wikipage. It uses a very simple coomunication protocol where first, the length of the image is sent as a 32-bit integer, and then the bytes of image data is sent. If the length is 0, this indicates that the connection should be closed as no more images will be forthcoming. The server script should be run first to ensure there’s a listening socket ready to accept a connection from the client script.
1.1 The server (server.py to be saved on the Laptop)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
# server.py
import io
import socket
import struct
from PIL import Image
import time
if __name__ == '__main__':
# Start a socket listening for connections on 0.0.0.0:8000
# (0.0.0.0 means all interfaces)
server_socket = socket.socket()
server_socket.bind(('0.0.0.0', 1308))
server_socket.listen(0)
# Accept a single connection and make a file-like object out of it
connection = server_socket.accept()[0].makefile('rb')
##############
# Parameters
##############
n_recs = 0
cnt_streamed_imgs = 0
summary = []
n_measurements = 100
avg_img_len = 0
W, H = 320, 240
try:
test = True
init = time.time()
while test:
# Read the length of the image as a 32-bit unsigned int.
image_len = struct.unpack('<L', connection.read(struct.calcsize('<L')))[0]
if not image_len:
break
# Construct a stream to hold the image data and read the image
# data from the connection
image_stream = io.BytesIO()
try:
#reading jpeg image
image_stream.write(connection.read(image_len))
image = Image.open(image_stream)
except:
#if reading raw images: yuv or rgb
image = Image.frombytes('L', (W, H), image_stream.read())
# Rewind the stream
image_stream.seek(0)
avg_img_len += image_len
elapsed = (time.time() - init)
cnt_streamed_imgs += 1
if elapsed > 10 and elapsed < 11:
#record number of images streamed in about 10secs
avg_img_len = avg_img_len / cnt_streamed_imgs
print("{} | Nbr_frames: {} - Elapased Time: {:.2f} | Average img length: {:.1f}]".format(n_recs, cnt_streamed_imgs, elapsed, avg_img_len) )
summary.append( [cnt_streamed_imgs, elapsed, avg_img_len] )
n_recs += 1
#reset counters
init = time.time()
cnt_streamed_imgs = 0
avg_img_len = 0
if n_recs == n_measurements:
#Number of measurements
test = False
#Write summary
with open("stream_perf_07.txt", "w") as file:
file.write("nbr_images, elapsed(sec), avg_img_size\n")
for record in summary:
file.write("{}, {}, {}\n".format( record[0], record[1], record[2]))
finally:
connection.close()
server_socket.close()
The image is not saved locally on the Laptop, but this can be easily done by adding at line 47 the following:
image.save('streamed_img.jpeg')
1.2 The client (client.py to be saved on the RPi.)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
# client.py
import io
import socket
import struct
import time
import picamera
import argparse
############
# arguments
############
parser = argparse.ArgumentParser(description="Client side-RPi streams Motion pictures")
parser.add_argument('-ip', '--ip_last_number', type=int, help='Last ip number of 192.168.0.xxx', default='108')
parser.add_argument('-W', '--img_width', type=int, help='width of captured image', default='320')
parser.add_argument('-H', '--img_height', type=int, help='height of captured image', default='240')
parser.add_argument('-format', '--img_format', type=str, help='Format of the image (jpeg/yuv, rgb)', default='jpeg')
parser.add_argument('-vidport', '--videoport', help='Use video Port True or False', type=int, default=1)
group = parser.add_mutually_exclusive_group()
group.add_argument("-seq", "--sequence", action="store_true", help="use capture_sequence")
group.add_argument("-cont", "--continuous", action="store_true", help="use capture_continuous")
args = parser.parse_args()
#######################################################################################
# Generator yields empty io.BytesIO object to store the captured image from picamera
#######################################################################################
def write_img_to_stream(stream):
connection.write(struct.pack('<L', stream.tell()))
connection.flush()
stream.seek(0) #seek to location 0 of stream_img
connection.write(stream.read()) #write to file
stream.seek(0)
stream.truncate()
def gen_seq():
stream = io.BytesIO()
while True:
yield stream
write_img_to_stream(stream)
###########################################################
# setup connection to server
###########################################################
# Connect a client socket to server_ip:8000
client_socket = socket.socket()
ip_address = "192.168.0.{}".format(args.ip_last_number)
client_socket.connect( ( ip_address, 1308 ) )
# Make a file-like object out of the connection
connection = client_socket.makefile('wb')
if __name__ == '__main__':
try:
with picamera.PiCamera() as camera:
if args.img_format != 'jpeg':
camera.raw_format = args.img_format
camera.resolution = ( args.img_width, args.img_height ) #default (320, 240)
# Start a preview and let the camera warm up for 2 seconds
camera.start_preview()
time.sleep(2)
camera.stop_preview()
print( args.sequence, args.continuous, args.img_format )
if args.sequence:
print("running in sequence")
camera.capture_sequence(gen_seq(), args.img_format, use_video_port=bool(args.videoport) )
elif args.continuous:
print("running in continuous")
stream = io.BytesIO()
for img in camera.capture_continuous(stream, args.img_format, use_video_port=bool(args.videoport)):
write_img_to_stream(stream)
else:
print("running in default")
camera.capture_sequence(gen_seq(), "jpeg", use_video_port=True)
connection.write(struct.pack('<L', 0))
finally:
connection.close()
client_socket.close()
In my case, the ip address of the server has the form 192.168.0.xxx where xxx is a digit between 100 and 199.
2. How to run the streaming
- It’s important to run the code on the server first, so that the connection is open:
python server.py
- Followed by (on the RPi):
python client.py -W 320 -H 240 -format 'yuv' -vidport 1 -seq
In this line, we set the image resolution to (Width=320, Height=240)px, the image format is yuv, use_video_port is set to True and capture_sequence method is used.
3. The Experiments
Each experiment is made of 100 records, where each record is the number of frames that is received by the laptop after 10 seconds.
3.1 Continuous versus Sequence
In this first experiment, we will compare 2 streaming methods available with Picamera. A stream of images can be captures with either of the following options:
capture_continuous(): Capture images continuously from the camera as an infinite iterator.
command line: python client.py -W 320 -H 240 -format 'jpeg' -vidport 1 -cont
capture_sequence(): Capture a sequence of consecutive images from the camera.
command line: python client.py -W 320 -H 240 -format 'jpeg' -vidport 1 -seq
In both cases, we use image resolution (320, 240) px, image format: jpeg and use_video_port set to True.
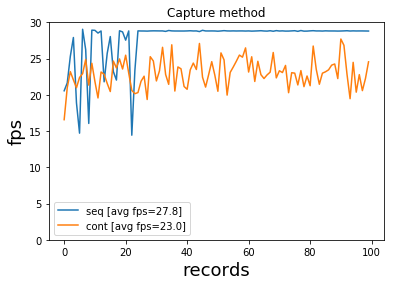
The average fps for capture_sequence and capture_continuous is fps=28 and fps=23 respectively.
capture_sequence results in a larger fps with in average 5 more fps than capture_continuous.
3.2 Video Port on/off
use_video_port parameter takes 2 values: True/False and controls whethr to use the video port to capture images.
use_video_port=True: python client.py -W 320 -H 240 -format 'jpeg' -vidport 1 -seq
use_video_port=False: python client.py -W 320 -H 240 -format 'jpeg' -vidport 0 -seq
In both cases, we use image resolution (320, 240) px, image format: jpeg and capture_sequence.
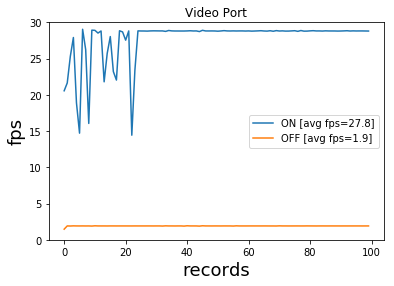
The average fps when use_video_port=True is fps=29, and fps=2 when use_video_port=False.
With use_video_port=True, we clearly get a boost in fps.
3.3 Image format
Now, let’s compare the streaming of 3 image formats: jpeg, yuv and rgb with the respective command line:
python client.py -W 320 -H 240 -format 'jpeg' -vidport 1 -seqpython client.py -W 320 -H 240 -format 'yuv' -vidport 1 -seqpython client.py -W 320 -H 240 -format 'rgb' -vidport 1 -seq
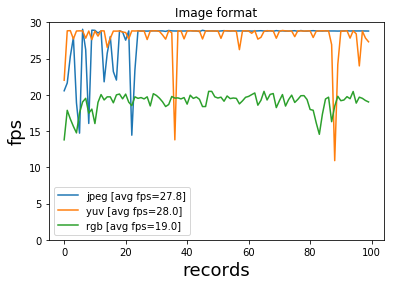
The average fps=28 for jpeg and yuv and fps=19 for rgb. Interestingly yuv and jpeg format results in the same fps, whereas the fps for rgb format degrades significantly .
Below, we plot the size of the streamed image for the different formats.
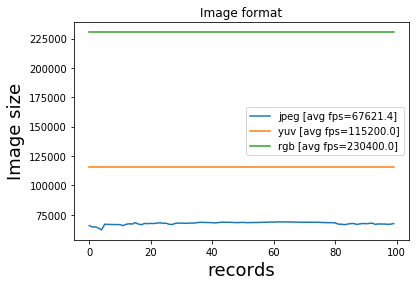
The average image size for jpeg, yuv and rgb is respectively: 67,621 bytes, 115,200 bytes, and 230,400 bytes. The rgb format has the largest size, which explains the drop in fps.
With yuv, the size of the streamed image is very consistent for the duration of the experiment, however with the jpeg format there are noticeable variations in image size.
Conclusion
In summary, better MJPEG streaming performance with the Picamera library is achieved with:
capture_sequenceuse_video_port=True.- image format, either
YUVorJPEG